1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
360
361
362
363
364
365
366
367
368
369
370
371
372
373
374
375
376
377
378
379
380
381
382
383
384
385
386
387
388
389
390
391
392
393
394
395
396
397
398
399
400
401
402
403
404
405
406
407
408
409
410
411
412
413
414
415
416
417
418
419
420
421
422
423
424
425
426
427
428
429
430
431
432
433
434
435
436
437
438
439
440
441
442
443
444
445
446
447
448
449
450
451
452
453
454
| /* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "adc.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "pid.h"
#include "stdio.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
// redirect `printf`
int fputc(int ch, FILE *f)
{
// 使用HAL库函数HAL_UART_Transmit将字符ch发送到UART4串口
HAL_UART_Transmit(&huart4, (uint8_t *)&ch, 1, 0xFFFF);
// 返回发送的字符,这通常不会有实际的影响,但是它需要返回发送的字符。
return ch;
}
// uint16_t Get_adc(void)
// {
// HAL_ADC_Start(&hadc1);
// HAL_ADC_PollForConversion(&hadc1, 2);
// if (HAL_IS_BIT_SET(HAL_ADC_GetState(&hadc1), HAL_ADC_STATE_REG_EOC))
// {
// return HAL_ADC_GetValue(&hadc1);
// }
// else
// {
// return Get_adc();
// }
// }
// uint16_t Get_adc_Average(uint8_t times)
// {
// uint32_t sum = 0;
// for (uint8_t i = 0; i < times; i++)
// {
// sum += Get_adc();
// }
// return sum / times;
// }
// define pid struct
struct PID_struct pid;
// the buf for screen usart
uint8_t rev_data[6];
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM3_Init();
MX_ADC1_Init();
MX_TIM2_Init();
MX_TIM4_Init();
MX_UART4_Init();
MX_USART1_UART_Init();
// 这里是一个坑, 详情请看下面的PWM部分的Read_Encoder()
TIM2->CNT = 0x7FFF;
// 把屏幕的UART的接受消息打开,
HAL_UART_Receive_IT(&huart1, rev_data, 6);
// 把PID结构体初始化,这里的P I D参数要看自己选择合适的值, 可以根据实际情况适当调节.
float Incremental_KP = 3, Incremental_KI = 0.5, Incremental_KD = 1;
// 调用PID初始化函数(这个代码我放在结尾吧, 作者是物院实验室某佬)
// 这里最后两个参数是限定I项的, 具体左右可以看代码
PID_init(&pid, Incremental_KP, Incremental_KI, Incremental_KD, 10, 10);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Supply configuration update enable
*/
HAL_PWREx_ConfigSupply(PWR_LDO_SUPPLY);
/** Configure the main internal regulator output voltage
*/
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE3);
while (!__HAL_PWR_GET_FLAG(PWR_FLAG_VOSRDY))
{
}
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_DIV1;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 4;
RCC_OscInitStruct.PLL.PLLN = 9;
RCC_OscInitStruct.PLL.PLLP = 2;
RCC_OscInitStruct.PLL.PLLQ = 2;
RCC_OscInitStruct.PLL.PLLR = 2;
RCC_OscInitStruct.PLL.PLLRGE = RCC_PLL1VCIRANGE_3;
RCC_OscInitStruct.PLL.PLLVCOSEL = RCC_PLL1VCOMEDIUM;
RCC_OscInitStruct.PLL.PLLFRACN = 3072;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2 | RCC_CLOCKTYPE_D3PCLK1 | RCC_CLOCKTYPE_D1PCLK1;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.SYSCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.AHBCLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB3CLKDivider = RCC_APB3_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_APB1_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_APB2_DIV2;
RCC_ClkInitStruct.APB4CLKDivider = RCC_APB4_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_1) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
// 这里定义一些变量
// 电机转一圈所需的Encoder读数累和
int Each_Circle = 1440;
// 设定的目标速度 Encoder读出的真实速度
int Target_Velocity = 0, Reality_Velocity = 0;
// 设定的目标位置总读数和 实际位置读数和
int Target_Position = 0, Reality_Position = 0;
// 给电机的PWM设定的占空比数值(这里需要每次累加,因为使用的是增程式pid)
int Set_Velocity = 0;
void Start_TIM(void)
{
// Start Encoder tim 开启解码器时钟
HAL_TIM_Encoder_Start(&htim2, TIM_CHANNEL_ALL);
// Start Time Control tim 开启定时控制的时钟
HAL_TIM_Base_Start_IT(&htim4);
// Start the pwm tim 开启pwm输出的时钟
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_3);
}
void Stop_TIM(void)
{
// 重置各种参数。 防止下次启动时有上次残留的值
Target_Velocity = 0;
Reality_Velocity = 0;
Target_Position = 0;
Reality_Position = 0;
Set_Velocity = 0;
// Stop Encoder tim 关闭解码器时钟
HAL_TIM_Encoder_Stop(&htim2, TIM_CHANNEL_ALL);
// Stop Time Control tim 关闭定时控制的时钟
HAL_TIM_Base_Stop_IT(&htim4);
// Stop the pwm tim 关闭pwm输出的时钟
HAL_TIM_PWM_Stop(&htim3, TIM_CHANNEL_3);
}
// 这个函数用来设定电机 正转/反转/不转/刹车
void MoTo(int mode)
// 这里需要对照你的接线来设定,BIN1和BIN2对应的不同状态状态可以在驱动的说明中找到
// 同时也要对应好 屏幕设定的 复选框 发送的0/1对应的正反转
/*
1 foreward
0 reversal
-1 stop
-2 brake
*/
{
switch (mode)
{
case 1:
HAL_GPIO_WritePin(GPIOB, BIN1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, BIN2_Pin, GPIO_PIN_SET);
break;
case 0:
HAL_GPIO_WritePin(GPIOB, BIN1_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB, BIN2_Pin, GPIO_PIN_RESET);
break;
case -1:
HAL_GPIO_WritePin(GPIOB, BIN1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, BIN2_Pin, GPIO_PIN_RESET);
break;
case -2:
HAL_GPIO_WritePin(GPIOB, BIN1_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB, BIN2_Pin, GPIO_PIN_SET);
break;
default:
HAL_GPIO_WritePin(GPIOB, BIN1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, BIN2_Pin, GPIO_PIN_RESET);
break;
}
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
// 这是HAL库提供的UART接收完成回调函数,当UART接收完成时,该函数会被自动调用。
// 判断是哪个UART触发了回调,这里使用了单个UART1,可以根据实际情况进行扩展。
if (huart == &huart1)
{
// 清除空闲中断标志位,UART通信中,空闲中断通常用于检测接收结束。
__HAL_UART_CLEAR_IT(&huart1, UART_CLEAR_IDLEF);
// 禁用UART发送中断,以防止在处理接收数据时发送数据。
__HAL_UART_DISABLE_IT(huart, UART_IT_TXE);
// 检查接收到的数据是否符合预期的协议,如果传输中出错了,就直接跳过不执行,根据协议格式解析数据。
// -1 -2 -3
if (rev_data[0] == 0xFF && rev_data[2] == 0xFE && rev_data[4] == 0xFD)
{
// 从接收到的数据中提取速度、圈数和模式信息。
int speed = rev_data[1];
int circle = rev_data[3];
int mode = rev_data[5];
// 检查速度和圈数是否都不为零,才需要转动。
if (speed != 0 && circle != 0)
{
// 如果目标速度和位置都为零,则说明当前没有进行任何动作,可以开始新的动作。
if (Target_Velocity == 0 && Target_Position == 0)
{
// 设置目标速度和目标位置。
Target_Velocity = speed;
Target_Position = circle * Each_Circle;
// 根据模式调用MoTo函数执行相应的操作。
// MoTo 函数定义时要把屏幕传过来的 (0/1) 和 真实转动的对应正确
MoTo(mode);
// 启动定时器,这样其他的中断才会发生。
Start_TIM();
}
}
else
{
// 如果速度或圈数为零,就说明要停下电机。
MoTo(-2); // 调用MoTo函数执行刹停电机。
// 重置各种参数(防止下次启动时有上次残留的值) 并且 停止定时器。
Stop_TIM();
}
}
// 重新启用UART发送中断,以便后续可以发送数据。
__HAL_UART_ENABLE_IT(huart, UART_IT_TXE);
// 重新启用UART接收中断,以便继续接收数据。
HAL_UART_Receive_IT(&huart1, rev_data, 6);
// 清空UART的数据寄存器,以确保不会因为残留数据而触发接收中断。
__HAL_UART_FLUSH_DRREGISTER(&huart1);
// 清除UART接收缓冲区非空标志位,以确保下一次接收可以正常触发中断。
__HAL_UART_CLEAR_FLAG(&huart1, UART_FLAG_RXNE);
}
}
// 这里读取encoder有一个坑
// 由于这个encoder是一直累加(或减,取决于电机正反转)的, 它累加到最大值(减到0) 就自动重置了
// 因此你上一次读的数 不一定比 这次读的数大, 这样一算差值, 就可能出现一个极其大的负值
// 为了防止这种情况, 我们就需要把这个 tim 的读数一开始(main里面就设置了)
// 就设定到一个 中间数值(0和最大之间), 并且 每次读完之后都把它设定回去
// 这样就能保证每次都得到一个 计算正确的 值
int16_t Read_Encoder(void)
{
int16_t count = __HAL_TIM_GET_COUNTER(&htim2);
TIM2->CNT = 0x7FFF;
count -= 0x7FFF;
// 这里因为电机 正传反转 有一种情况是累加,一种是累减, 所以有正有负
// 但是计算pid并设置pwm都是正值, 所以返回绝对值
if (count < 0)
{
return count * -1;
}
else
{
return count;
}
}
int Dead_Voltage = 160;
void Set_Pwm(int Velocity)
{
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_3, Velocity + Dead_Voltage);
}
// 固定时间间隔的 中断控制, 每0.1秒多执行一次
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim == &htim4)
{
// 读取实际转速(相当于转速)
Reality_Velocity = Read_Encoder();
// 转速累和相当于总距离(实际上转速使用这个总距离做差才算出来的,前面已经解释过了)
Reality_Position += Reality_Velocity;
// 每次先判断是不是已经到了设定的要转的总距离, 如果是, 刹车关定时器重置相关参数
if (Reality_Position >= Target_Position)
{
// 刹车
MoTo(-2);
// 停止计时器
Stop_TIM();
}
// 用PID算法计算出要设定的pwm值
Set_Velocity += PID(&pid, Target_Velocity, Reality_Velocity);
// 这里串口输出一下调试信息,方便查看
printf("target: %d, real: %d, set: %d\n", Target_Velocity, Reality_Velocity, Set_Velocity);
// 设定pwm值
Set_Pwm(Set_Velocity);
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
|
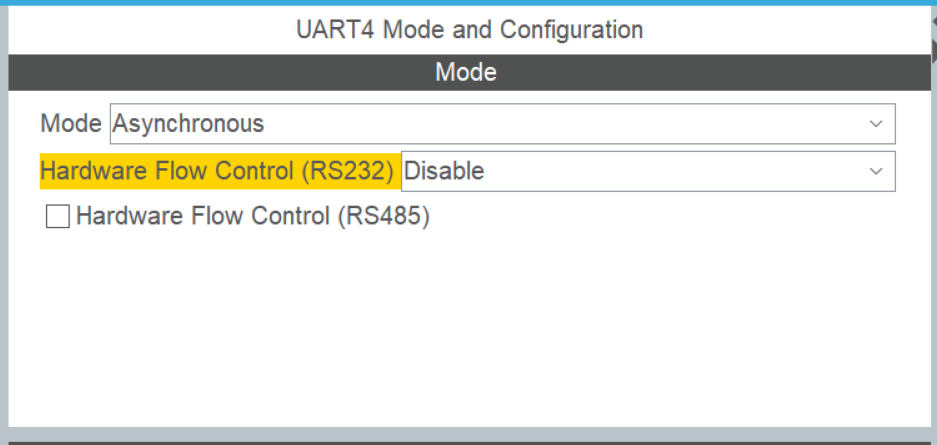
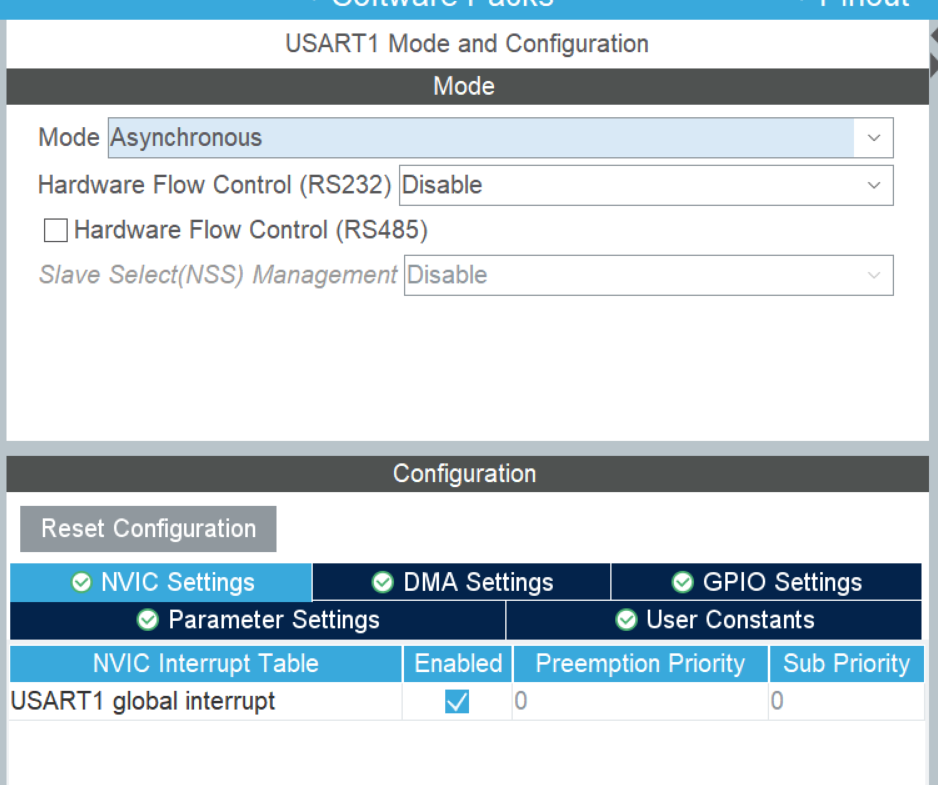 ![发送调试信息到Pwlink2lite的Usart把Mode打开成Async就好]
![发送调试信息到Pwlink2lite的Usart把Mode打开成Async就好]